
Nouveaux muscles artificiels : des robots plus légers, plus sûrs et plus robustes
Issu d'études à l'École polytechnique de Zurich, une technologie pour des groupes musculaires plus proches de ceux de l'homme et sensibles aux interactions avec l'environnement
Des chercheurs de l'ETH Zurich ont récemment développé des muscles artificiels pour le mouvement des robots, mais leur solution offre plusieurs avantages par rapport aux technologies vues précédemment.
Méritant d'être étudiée plus en profondeur, elle peut être utilisée dans tous les cas où les robots doivent être mous plutôt que rigides ou doivent être plus sensibles dans leurs interactions avec l'environnement.
De nombreux roboticiens rêvent de construire des robots qui ne soient pas seulement une combinaison de métal ou d'autres matériaux durs et de moteurs, mais aussi des robots plus souples et plus adaptables.
Les automates « doux » peuvent interagir avec l'environnement d'une manière complètement différente ; par exemple, ils pourraient amortir les chocs comme le font les membres humains ou saisir délicatement un objet.
Cela offrirait également des avantages en termes de consommation d'énergie : aujourd'hui, le mouvement des robots nécessite généralement beaucoup d'énergie pour maintenir une position pendant une longue période, alors que les systèmes logiciels pourraient mieux la stocker.
Alors, quoi de plus évident que de prendre le muscle humain comme modèle et d’essayer de le recréer ?
Au revoir PRN Robotique: douze années complètes au service de la Suisse
Il y a un drone qui "escalade" les arbres pour les protéger

Chaque muscle naturel se contracte également en réponse à une impulsion électrique suffisante
Le fonctionnement des muscles artificiels repose nécessairement sur la biologie.
Comme leurs homologues naturels, les muscles artificiels se contractent en réponse à une impulsion électrique.
Cependant, les muscles artificiels ne sont pas constitués de cellules et de fibres, mais d'un sac rempli d'un liquide (généralement de l'huile) dont l'enveloppe est partiellement recouverte d'électrodes.
Lorsque ces électrodes reçoivent une tension électrique, elles se rassemblent et poussent le liquide dans le reste du sac, qui fléchit et est donc capable de soulever un poids.
Un seul sac est analogue à un court faisceau de fibres musculaires.
Plusieurs de ces sacs peuvent être reliés entre eux pour former un élément de propulsion complet, également appelé actionneur ou, plus simplement, muscle artificiel.
Prix à ProteusDrone, le robot mou aux formes mutantes
Un chien robot : l'invention suisse inspirée de la biologie animale
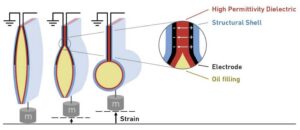
(Illustration : Gravert et al/Science/ETH Zurich)
À l'origine, les actionneurs électrostatiques nécessitaient une tension de 6.000 10.000 à XNUMX XNUMX Volts
L'idée de développer des muscles artificiels n'est pas nouvelle, mais jusqu'à présent il y avait un obstacle majeur à leur réalisation : les actionneurs électrostatiques ne fonctionnaient qu'avec des tensions extrêmement élevées, d'environ 6.000 10.000 à XNUMX XNUMX volts.
Cette exigence avait plusieurs conséquences : par exemple, les muscles devaient être connectés à de gros et lourds amplificateurs de tension, ils ne fonctionnaient pas dans l'eau et n'étaient pas entièrement sans danger pour l'homme.
Une nouvelle solution a maintenant été développée par Robert Katzschmann, professeur de robotique à l'ETH Zurich, avec Stephan-Daniel Gravert, Elia Varini et d'autres collègues.
Ils ont publié un article sur leur version d'un muscle artificiel, qui offre en réalité plusieurs avantages, dans un article sur le site d'information « Science Advances ».
Stephan-Daniel Gravert, qui travaille comme assistant scientifique dans le laboratoire de Robert Katzschmann, a conçu une nouvelle coque pour le sac.
Un nouveau drone anti-incendie anglo-suisse pour venir en aide aux pompiers
Ainsi en Suisse les robots "apprennent" les secrets du trekking

(Photo : Gravert et autres, Science, 2024)
La solution pour l'avenir ? Aujourd’hui, il s’agit d’un matériau ferroélectrique à haute perméabilité
Les chercheurs appellent les nouveaux muscles artificiels des actionneurs HALVE, où HALVE signifie « Hydraulically Amplified Low-Voltage Electrostatic ».
« Dans d'autres actionneurs, les électrodes sont situées à l'extérieur de la coque. Chez nous, la coque est composée de plusieurs couches. Nous avons pris un matériau ferroélectrique à haute perméabilité, c'est-à-dire capable de stocker des quantités relativement importantes d'énergie électrique, et l'avons combiné avec une couche d'électrodes. Ensuite, nous avons recouvert le tout d'une coque en polymère qui possède d'excellentes propriétés mécaniques et rend le sac plus stable. », il explique.
Les chercheurs ont ainsi pu réduire la tension requise, car la permittivité beaucoup plus élevée du matériau ferroélectrique permet d'obtenir des forces importantes malgré la faible tension.
Stephan-Daniel Gravert et Elia Varini ont non seulement développé ensemble la coque des actionneurs HALVE, mais ont également construit eux-mêmes les actionneurs en laboratoire pour les utiliser dans deux robots spécifiques.
A Tel Aviv un laboratoire Enel sur l'utilisation de l'IA et de la robotique dans l'énergie
C'est ainsi que le robot Atlas peut déjà fonctionner et interagir avec nous
(Photo : capture d'écran vidéo de Gravert et al, Science, 2024)
Des « pinces » et des « poissons » techniques montrent ce que peut faire le muscle conçu en Suisse
Un exemple de robot est une pince de 11 centimètres de haut et dotée de deux doigts.
Chaque doigt est déplacé par trois poches connectées en série de l'actionneur HALVE.
Une petite alimentation par batterie alimente le robot en 900 Volts.
Ensemble, la batterie et l’alimentation ne pèsent que 15 grammes.
L’étrier entier, y compris l’électronique de puissance et de commande, pèse 45.
La pince peut saisir un objet en plastique lisse avec suffisamment de force pour supporter son propre poids lorsque l'objet est soulevé dans les airs avec une corde.
« Cet exemple démontre parfaitement à quel point les actionneurs HALVE sont petits, légers et efficaces. Cela signifie également que nous avons fait un grand pas en avant vers notre objectif de créer des systèmes intégrés pilotés par les muscles. »», se réjouit Katzschmann.
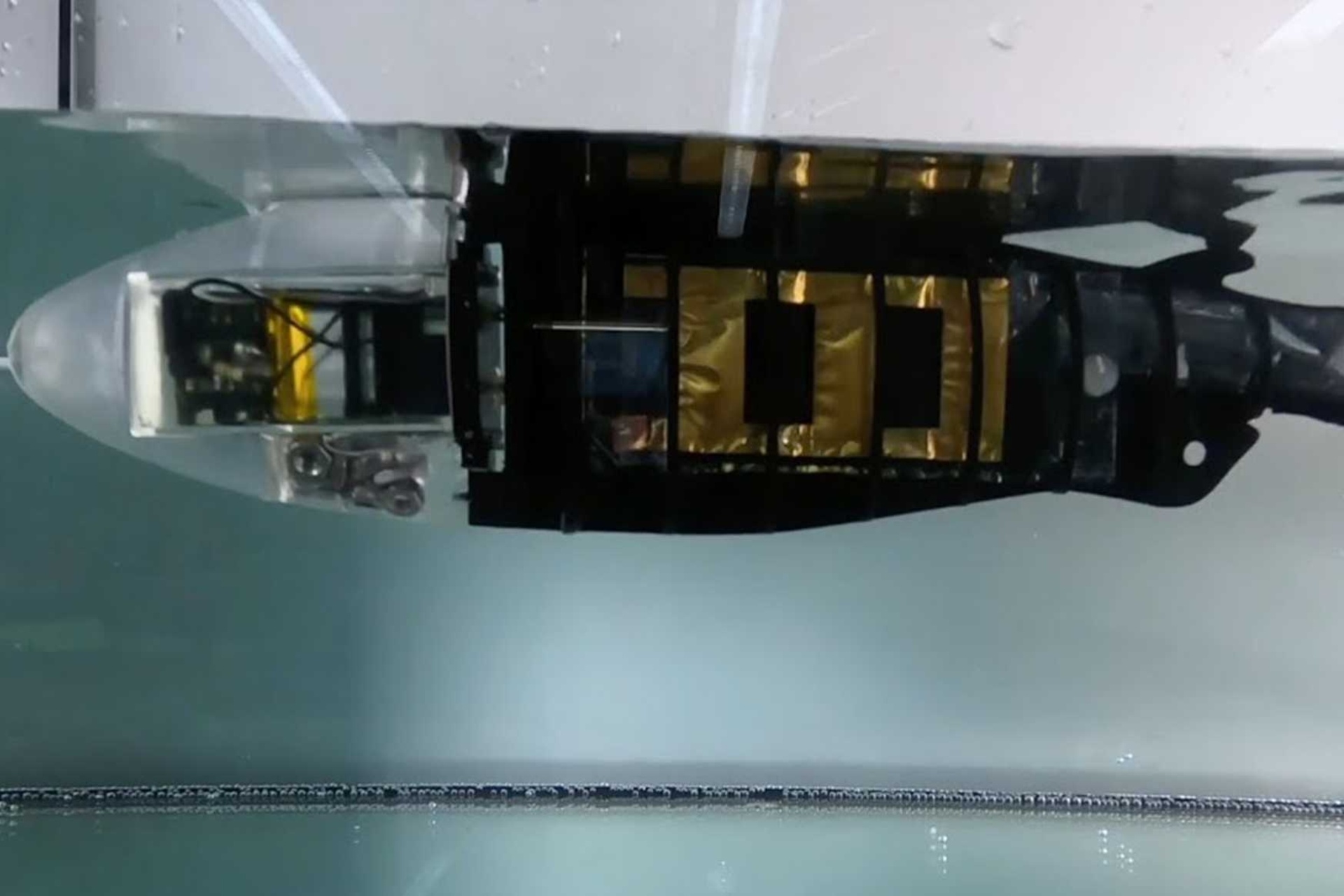
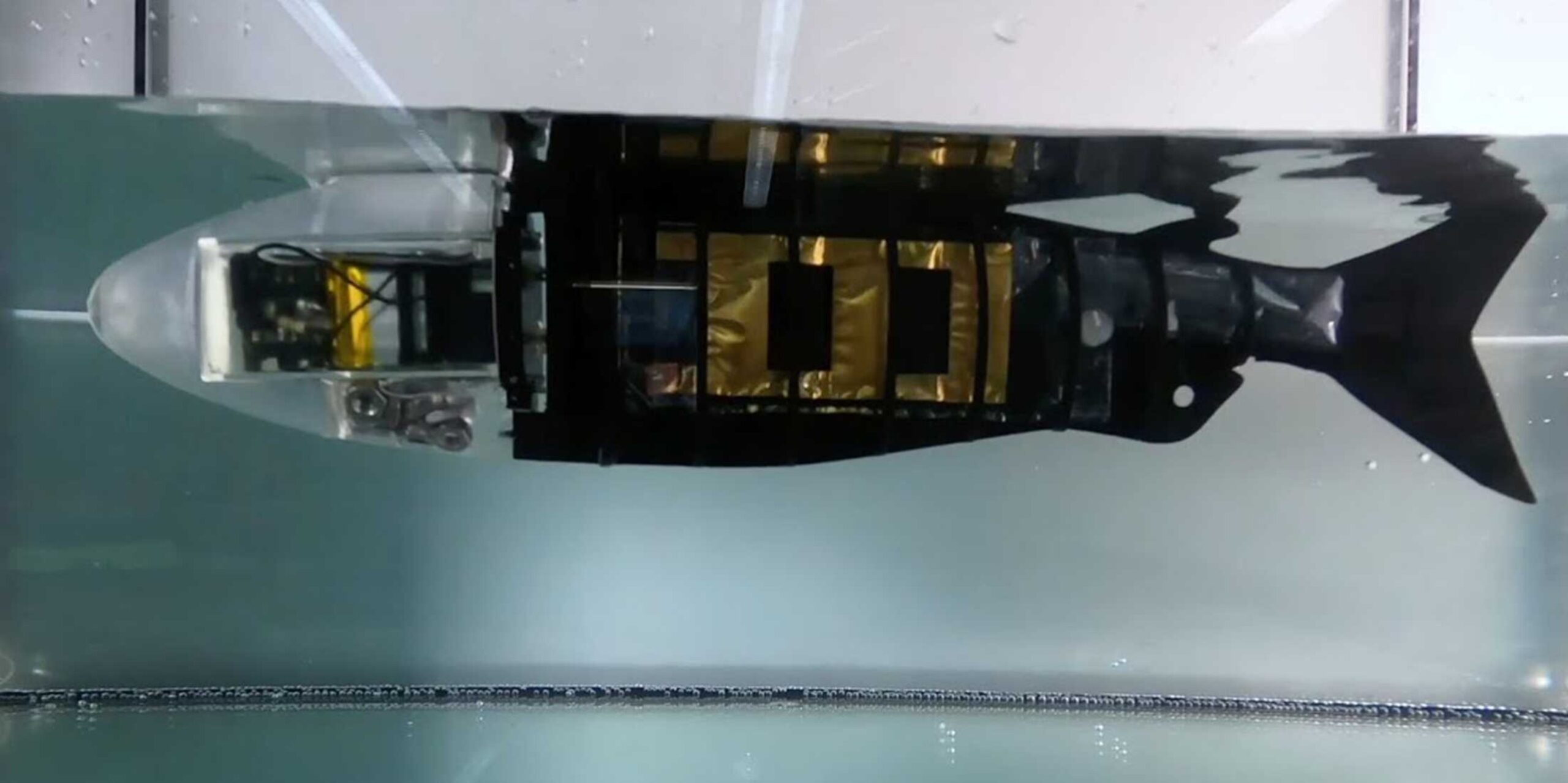
Le deuxième objet est un nageur ressemblant à un poisson, mesurant près de 30 centimètres de long, capable de se déplacer facilement dans l'eau.
Il se compose d'une « tête » qui contient l'électronique et d'un « corps » flexible auquel sont fixés les actionneurs « électrostatiques basse tension à amplification hydraulique ».
Ces actionneurs se déplacent alternativement à un rythme qui produit le mouvement typique de la natation.
Le poisson autonome peut sortir d'un état de stase à une vitesse de trois centimètres par seconde en 14 secondes, et tout cela immergé dans l'eau du robinet ordinaire.
Un chien robot : l'invention suisse inspirée de la biologie animale
En Suisse les Ecoles Polytechniques Fédérales pour une IA transparente et fiable

Les nouveaux actionneurs sont beaucoup plus robustes que les autres muscles artificiels et étanches
Ce deuxième exemple est important car il démontre une autre nouvelle fonctionnalité des actionneurs HALVE.
Les électrodes n’étant plus protégées à l’extérieur de la coque, les muscles artificiels sont désormais étanches et peuvent même être utilisés immergés dans des liquides conducteurs.
« Le poisson illustre un avantage général de ces actionneurs : les électrodes sont protégées de l'environnement extérieur et, inversement, l'environnement est protégé par les électrodes. Ainsi, vous pouvez utiliser ces actionneurs électrostatiques dans l’eau ou les toucher par exemple”, ajoute le professeur de l'École polytechnique fédérale de Zurich.
La structure en couches des enveloppes présente également un autre avantage : les nouveaux actionneurs sont beaucoup plus robustes que les autres muscles artificiels.
Idéalement, les enveloppes devraient pouvoir effectuer de nombreux mouvements et le faire rapidement.
Cependant, même la plus petite erreur de fabrication, comme un grain de poussière entre les électrodes, peut entraîner une panne électrique, une sorte de « mini coup de foudre ».
Le 4 novembre à Lausanne la "Journée Suisse de la Robotique"
Avec le DroneHub une « volière » inédite pour la recherche sur les drones

Problèmes de « mini-éclair » résolus, les entreprises prêtes à produire à grande échelle
«Lorsque cela se produisait sur les modèles précédents, l'électrode brûlait, créant un trou dans la coque. Cela a permis au liquide de s'échapper et a rendu l'actionneur inutilisable., explique Stéphan-Daniel Gravert.
Ce problème a été résolu dans les actionneurs HALVE car un seul trou se ferme tout seul, grâce à la couche extérieure protectrice en plastique.
De ce fait, le boîtier reste pleinement fonctionnel même après une panne électrique.
Les deux chercheurs sont certes heureux d'avoir réalisé une avancée décisive dans le développement des muscles artificiels, mais ils sont également réalistes.
Comme le dit Robert Katzschmann : «Nous devons maintenant préparer cette technologie pour une production à grande échelle, ce que nous ne pouvons pas faire ici, au laboratoire de l'ETH. Sans faire trop de révélations, je peux dire que nous constatons déjà l'intérêt d'entreprises qui souhaiteraient travailler avec nous."
Par exemple, les muscles artificiels pourraient un jour être utilisés dans de nouveaux robots, prothèses ou appareils portables.
Autrement dit, dans les technologies destinées à être utilisées dans et sur le corps humain…
Une framboise en... silicone pour demander aux robots de récolter
Le juste hommage de Lugano à la jeune équipe de robotique Smilebots



Pince sans contrainte, entraînée par des actionneurs HALVE, saisissant un bloc de PLA
Poisson artificiel non attaché, entraîné par des actionneurs HALVE, dans l'eau du robinet
Vous pourriez également être intéressé par :

Taam Ja' est le « trou bleu » le plus profond du monde : la découverte
Une cavité marine sondée au large de la péninsule du Yucatan et découverte quatre fois plus profonde que le précédent gouffre record au Belize

Au Brésil la première rencontre au monde entre biosécurité et synchrotrons
À Campinas, un laboratoire de confinement biologique maximum de niveau NB4 sera connecté aux sources lumineuses d'un accélérateur de particules

Dans le Haut Adige, EDIH NOI est aujourd'hui le nouveau point de référence pour l'IA
A Bolzano, 4,6 millions d'euros du fonds PNRR seront alloués aux services aux entreprises locales dans le domaine de la numérisation du renseignement…
L'Autriche, l'Allemagne et la Suisse pour des chemins de fer de fret « plus innovants »
Les ministres DACH Leonore Gewessler, Volker Wissing et Albert Rösti : l'introduction du couplage automatique numérique est un élément clé

 //
//